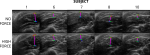
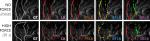
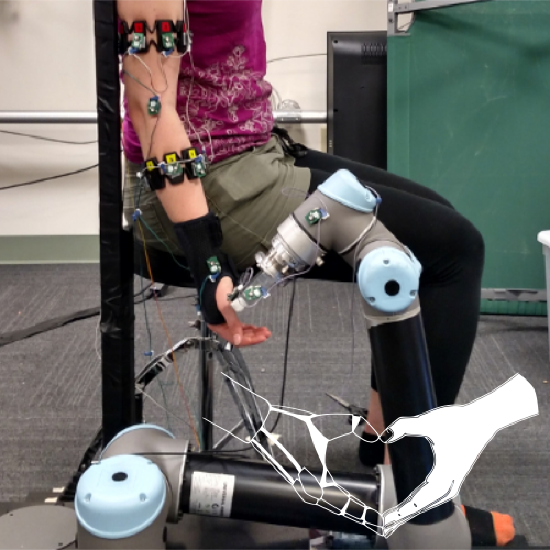
As a Postdoctoral Researcher in Mechanical Engineering and Applied Mechanics, I work with the Kumar Lab, Rehabilitation Robotics Lab, Figueroa Lab, and other GRASP researchers to develop safer and more dexterous human–robot systems, including assistive devices, rehabilitation robots, and collaborative manipulation teams. Specifically, I investigate the use of novel musculoskeletal sensing modalities (e.g., ultrasound-measured muscle deformation) and novel modeling and control infrastructures to make these systems quantitatively effective, intuitive, reliable, and personalizable for their human users.
In August 2021, I completed my Ph.D. thesis in UC Berkeley’s HART Lab, (part of BAIR and previously the Teleimmersion Lab) with Prof. Ruzena Bajcsy. Previously, I worked on neuromuscular modeling for lower-limb prostheses in the MIT Media Lab’s Biomechatronics Group and on perception software for Carnegie Mellon’s humanoid robot, CHIMP.
Education
-
Ph.D. in Electrical Engineering and Computer Science, 2021
University of California, Berkeley
-
S.B. in Electrical Engineering and Computer Science, 2015
Massachusetts Institute of Technology