Advised by G. Clark Haynes and Kyle Strabala.
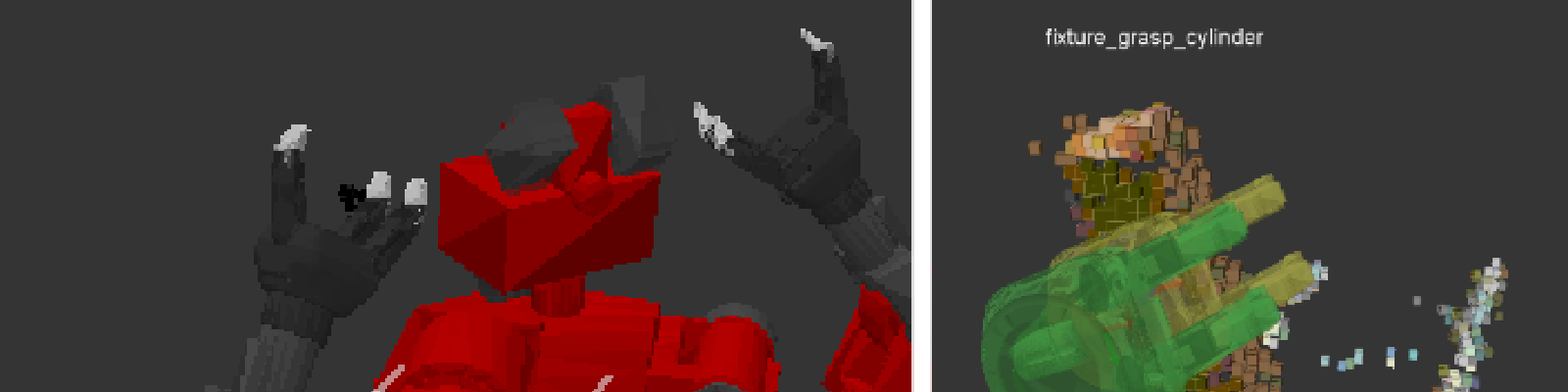
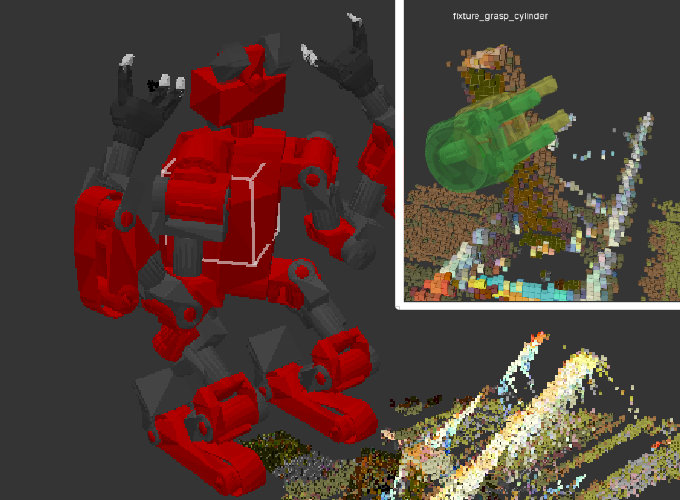
The goal of this project was to allow CMU’s CHIMP robot to grasp arbitrary objects quickly and autonomously (e.g., during the rubble manipulation task of the DARPA Robotics Challenge). I designed a “one-click fixturing” pipeline to generate and rank possible grasps requiring only a single click from CHIMP’s operator in the voxel environment. I then evaluated the success of this pipeline on a number of objects relevant to the DRC tasks and issued recommendations for further modifications to the system.