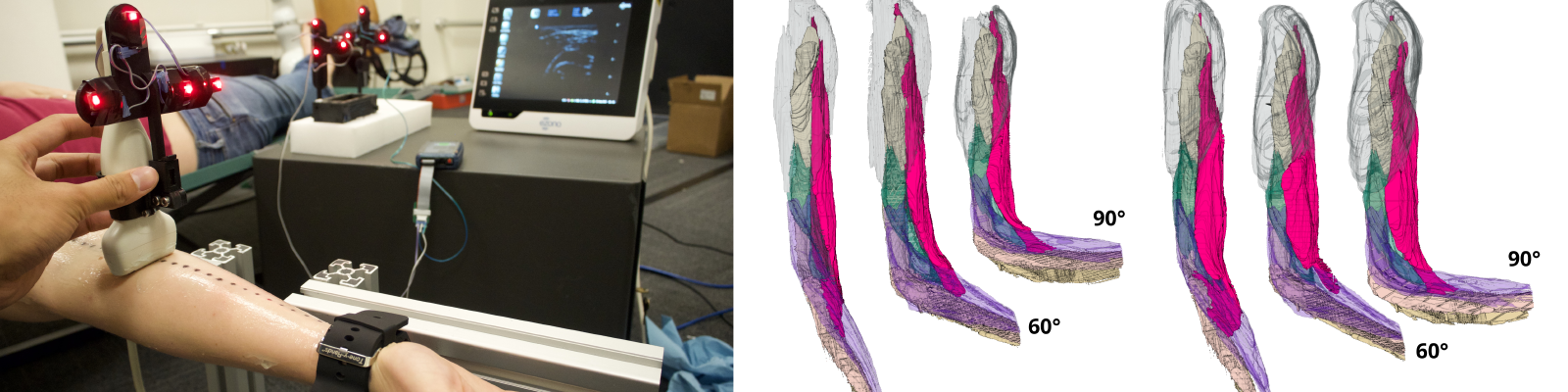
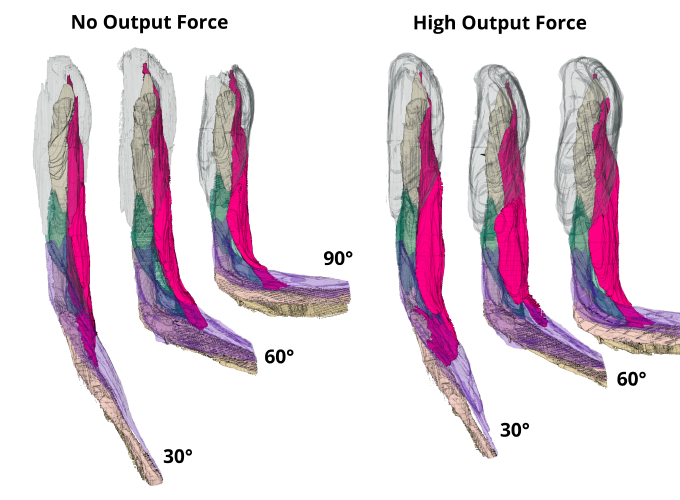
 Left: Ultrasound and motion capture are combined to generate full 3D images of arm musculature. Right: 3D renderings of arm musculature show significant deformation under changes in elbow angle and force output.
Left: Ultrasound and motion capture are combined to generate full 3D images of arm musculature. Right: 3D renderings of arm musculature show significant deformation under changes in elbow angle and force output.
Empirical Quantification and Modeling of Muscle Deformation: Toward Ultrasound-Driven Assistive Device Control
 Left: Ultrasound and motion capture are combined to generate full 3D images of arm musculature. Right: 3D renderings of arm musculature show significant deformation under changes in elbow angle and force output.
Left: Ultrasound and motion capture are combined to generate full 3D images of arm musculature. Right: 3D renderings of arm musculature show significant deformation under changes in elbow angle and force output.
Empirical Quantification and Modeling of Muscle Deformation: Toward Ultrasound-Driven Assistive Device Control
Abstract
Surface electromyography is currently the sensing modality of choice for control of biosignal-driven prostheses and exoskeletons; however, the sensor’s noisy and aggregate nature inhibits collection of distinguishable signal streams to robustly manipulate multiple device degrees of freedom (DoF). We here explore 2D B-mode ultrasound as an alternative source of muscle activation data (namely, muscle deformation) that can be more precisely localized, allowing for the theoretical collection of multiple naturally-varying signals that could be used to control high-DoF assistive devices. We here present a proof-of-concept study showing a) the observability of muscle deformation via ultrasound, and b) novel descriptions of the spatially-varying nature of the signal. These analyses are accomplished through the study of nine volumetric scans of the biceps brachii under varied elbow angle and loading conditions, collected and spatially localized using an ultrasound scanner and motion capture. We here establish the feasibility of measuring several force-associated deformation signals (including muscle cross-sectional area and thickness) via real-time ultrasound scanning and quantify the spatial variation of these signals. Additionally, we propose future applications for both our signal characterizations and the generated muscle volume data set, including better design of assistive device sensor locations and validation of existing muscle deformation models.
