
Advised by Michael Eilenberg and Hugh Herr.
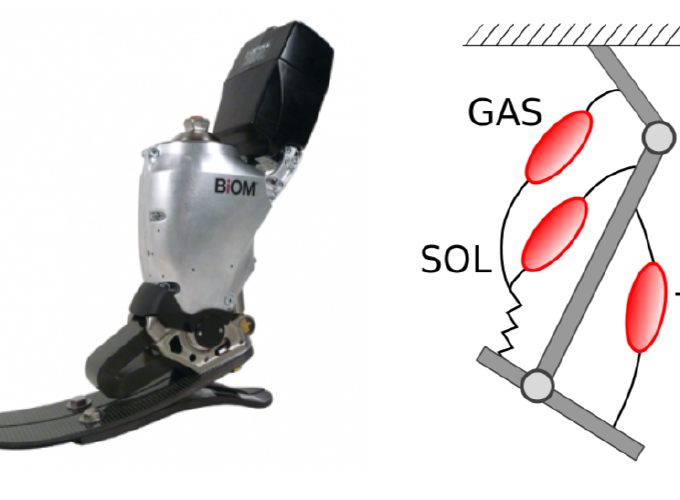
Transtibial amputees lack the powerful calf muscles that humans need to walk smoothly and efficiently, resulting in a variety of pathologies during basic walking tasks. While several biomimetic ankle-foot prostheses are commercially available, these devices are unable to replicate the function of muscles acting at the knee. Thus, the purpose of this research was to develop an electromechanical platform to unify a knee brace (“artificial gastrocnemius”) and ankle-foot prosthesis (BiOM) to more fully simulate the lower leg of an intact subject.
As an undergraduate researcher on the project, I adapted and extended Dr. Jared Markowitz’s work on neuromuscular modeling of human walking into a prosthesis control system using MATLAB and Simulink. Additionally, I wrote a C++ UART interface between the BiOM’s microcontroller and the Raspberry Pi controlling the artificial gastrocnemius.
Project report available here.